Hugging Face が Bringing Robotics AI to Embedded Platforms: Dataset Recording, VLA Fine‑Tuning, and On‑Device Optimizations をリリース ── 組み込みロボットにVLAを載せるためのシステム工学ガイド
テキストだけの思考からマルチモーダル、そしてついにロボットの制御へ。AIの進化は目まぐるしいが、それをリソースの少ない組み込み機器で動かすのは至難の業だ。Hugging FaceとNXPが、VLAモデルを現実のロボットプラットフォームに乗せるための「鉄則」を公開した。単なる精度の話ではなく、システム全体の設計思想が問われる内容になっている。
▸何が変わったのか
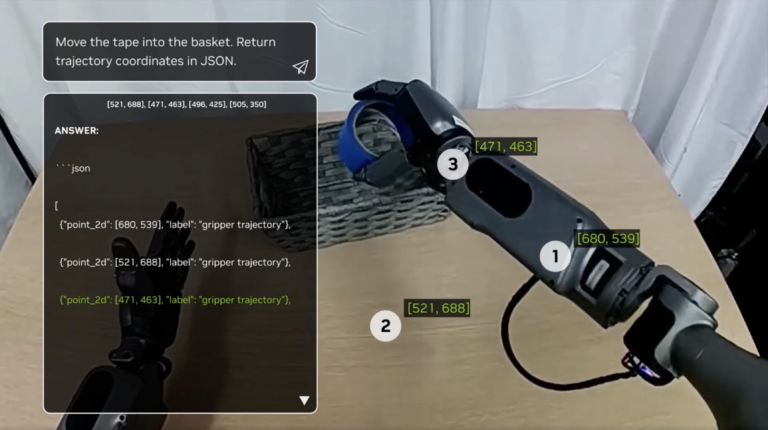
NXPが、VLA(Vision-Language-Action)モデルを組み込みロボットプラットフォームへ実装するためのベストプラクティスを提示。モデルの圧縮だけでは解決しない「アーキテクチャ分解」や「レイテンシ認識スケジューリング」などのシステム工学的アプローチを掲げている。具体的には、「ACT」や「SmolVLA」のファインチューニング手法と、「NXP i.MX95」での最適化によるリアルタイム性能を解説。また、「ティーバッグをマグカップに入れる」というタスクを通じて、固定カメラや照明管理など高品質なデータセット収録のコツを明らかにしている。



◈技術背景と意義
VLAは、画像と言語を理解してロボットの動作を決めるモデルだが、組み込み環境ではメモリや電力に厳しい制限がある。ここで重要なのが「非同期推論」。推論(考えること)と実行(動くこと)を分離することで、モデルが計算している間もロボットを止まらせず、滑らかな動作を実現する。ただし、これには推遅時間が動作時間より短いという厳しい条件設定が求められるというわけだ。
▸こんな人・用途に
組み込みAIロボットの開発に取り組むエンジニア。特に計算リソースが限られた環境で、ティーバッグをマグカップに入れるようなマニピュレーションタスクを自動化したいケース。
◆入手方法・リンク
Hugging FaceのEnterpriseセクションで公開されている記事から詳細を読むことができる。現時点ではGitHubリンク等は提供されておらず、クローズドソースの取り組みとして紹介されている。
SOURCE: Hugging Face (2026-03-05)