Hugging Face × AWS が Strands Agents と LeRobot の統合を解説 ── データ収集から実機デプロイまでをひとつのエージェントで完結
ロボット開発って、ツールがバラバラすぎない? デモの記録、訓練、シミュレーションテスト、実機デプロイ、複数台の協調――それぞれ別のツールを使うのが当たり前だった。それが全部、ひとつのエージェントループに収まる。AWSのStrands Robots SDKとHugging FaceのLeRobotが統合されて、Hub上のデータセットから物理ロボットまでをシームレスに繋ぐ仕組みが公開された。
▸何が変わったのか
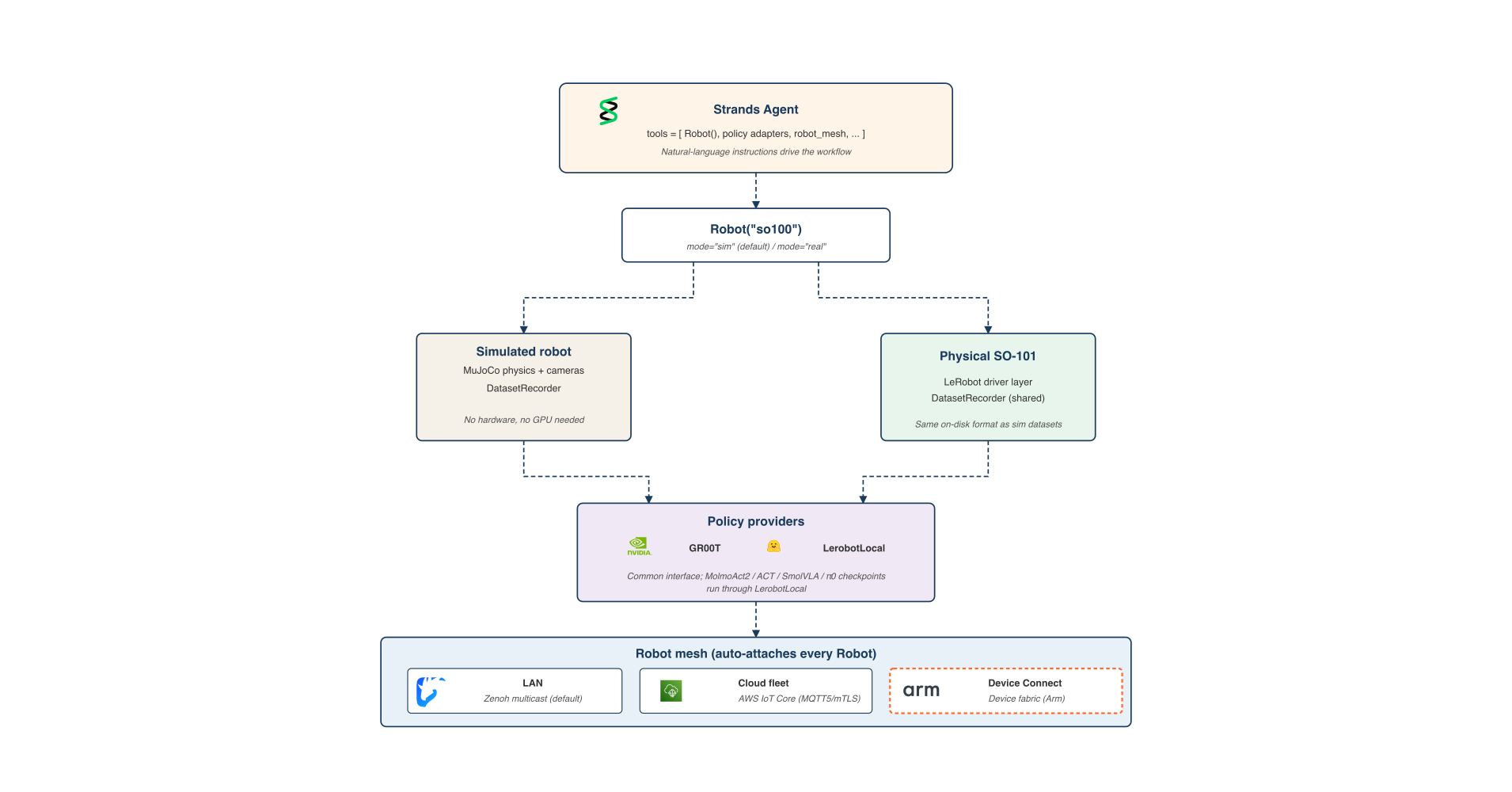
従来は5つの別ツールが必要だったワークフロー(記録・訓練・シミュレーション・デプロイ・群制御)を、単一のStrands agentに統合。Strands Robots SDK(AWS製、Apache 2.0)がLeRobotスタックをAgentToolsとして公開し、エージェントが各ステップをオーケストレーションする。シミュレーション(MuJoCoベース)と実機で同じLeRobotDataset形式を使用。デプロイはキーワード引数を`mode=”real”`に変えるだけで、SO-101実機に切り替わる。GR00TとLerobotLocalが共通インターフェースでポリシー推論を提供し、MolmoAct2チェックポイントもLerobotLocal経由で動く。複数台のロボットはZenohメッシュで協調。デフォルトパスならGPUもHF認証もハードウェアも不要で、ノートPCのシミュレーションだけで完結する。
◈前モデル / 競合との比較
従来は記録・訓練・シミュレーション・デプロイ・群制御がそれぞれ独立したツールで、相互に通信しなかった。Strands統合後は、LeRobotのデータセット形式を維持したまま、エージェントループが全体を接着剤のように繋ぐ。実機への切り替えもカスタムコード不要、引数1つで完了する。



◈技術背景と意義
ロボットAIの最大の壁は「sim-to-realギャップ」――シミュレーションで学習させたポリシーが、現実の物理環境でそのまま動かない問題。この統合は、シミュレーションと実機でデータフォーマットを完全に統一することで、その壁を低くしようとしている。要は「シミュで集めたデータも、実機で集めたデータも、同じ形で同じパイプラインに通せる」ということ。エージェントが全体を取り仕切る設計なので、人間がツール間を手動で行き来する必要がない。ロボット開発の民主化という意味でも、GPUなしで試せるハードルの低さは大きい。
▸こんな人・用途に
Hugging Face Hub上にデモデータがあり、新しいタスクをロボットに学習させたい研究者やエンジニア。SO-101などで実機実験を回しているロボティクスの現場。複数台のロボット群をプログラムで一括制御したいチーム。
◆入手方法・リンク
サンプルコードは examples/lerobot/hub_to_hardware.py および hub_to_hardware.ipynb として公開。ノートブックはシミュレーション専用・モックポリシーで動くので、ハードウェアもGPUもHugging Faceの認証も不要。GitHubからクローンしてすぐローカルで試せる。
SOURCE: Hugging Face (2026-06-17)

